

Луна — слишком большой новый континент, чтобы его могли исследовать только два астронавта. Чтобы сделать радиус действия широким, доктор Вернер фон Браун планировал доставить автомобиль на Луну на раннем этапе развития программы «Аполлон».

длина:122 дюйма (310 см)
ширина: 6 футов (183 см)
колесная база:90 дюймов (230 см)
вес:на Земле:462 фунта(209 кг) на Луне:77 фунтов(35 кг)
дорожный просвет:14 дюймов (35,5 см)
Радиус поворота: 10 футов (305 см)
максимальная скорость: 8,7 миль/ч (14 км/ч)
источник питания: серебряно-цинковые батареи 36 В x 2, двигатель постоянного тока x 4
дальность:около 57 миль (92 км)
производитель: BOEING Company Space Center Seattle, Washington. General Mortors Delco Electronics Division's Santa Barbara Operation California. (навигационная система: BOEING Company Aerospace Group Electronics Organization)
Разработка
LRV был построен компанией Boeing и ее дочерним предприятием General Mortors Delco Electronics Division по контракту с Центром космических полетов им. Маршалла НАСА. В 1969 году, когда Apollo 11 успешно достиг Луны, были проведены исследования по созданию лунного велосипеда для одноместной поездки. Перед выпуском LRV-1 для Apollo 15 были изготовлены следующие восемь испытательных транспортных средств для разработки.
Полномасштабный макет: для проверки проекта.
LM-LRV: для исследования влияния нагрузки на структуру LM.
две шестые единицы веса: для разработки механизма системы развертывания
Испытательный блок для проверки мобильности: для проверки системы привода.
Устройство для измерения нормальной земной гравитации: для тренировки астронавтов на Земле, произведено компанией Delco Electronics.
Вибрационный блок: для выявления любых потенциальных слабых мест в конструкции.
Квалификационный блок: испытан в условиях, ожидаемых на поверхности Луны.

И три LRV от LRV-1(APOLLO15) до LRV-3(APOLLO17) были изготовлены и использованы на Луне. Конструкция ремня безопасности была изменена на LRV-2, а конструкция крыла была изменена на LRV-3.
LRV-1 был передан NASA 14 марта 1971 года. Это было всего через 17 месяцев после того, как Boeing начал разрабатывать LRV. Говорят, что это была феноменальная скорость, учитывая, что все блоки Apollo (от CSM до скафандров) заняли 50-60 месяцев от начала разработки до отправки.

Производительность
LRV будет перевозить в общей сложности около 1140 фунтов (517 кг), включая двух астронавтов и их систему жизнеобеспечения (PLSS), научные экспериментальные материалы около 340 фунтов, лунные образцы. Это более чем в два раза превышает его собственный вес. Для сравнения, средний семейный автомобиль может перевозить только около половины своего веса. А эксплуатационный срок службы LRV на Луне составил около 78 часов в течение лунного дня.
LRV может преодолевать препятствия высотой в один фут с места и пересекать 28-дюймовые расщелины. Полностью загруженный автомобиль сможет подниматься и спускаться по склонам крутизной до 25 градусов. Стояночный тормоз будет удерживать LRV на склонах до 35 градусов. LRV может двигаться по склону с наклоном 45 градусов и крениться с полной нагрузкой.
Его максимальная скорость достигает 14 км/ч в миссии Apollo 15 и 17 км/ч в миссии Apollo 16.

Структура
Панели пола шасси представляли собой панели из бисера из алюминия. Клиренс поддерживался от 17 дюймов (пустой) до 14 дюймов (полная загрузка) самосвалом. Два сиденья представляли собой трубчатые алюминиевые рамы, натянутые на нейлон. Они складывались на центральное шасси и раскладывались астронавтами как садовый стул.
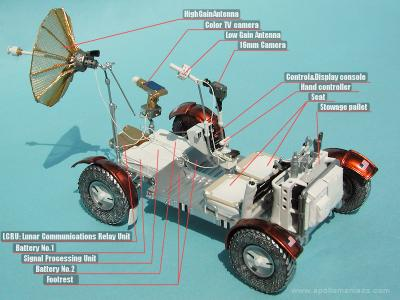
Конфигурация лунного вездехода «Аполлон» (фото масштабной модели)Консоль управления и индикации была установлена в центре шасси. На консоли есть ручной контроллер, навигационная система, показывающая расстояние и направление от LM. А подлокотник, сделанный из стекловолокна, был установлен перед ручным контроллером.
Колеса представляют собой открытую конструкцию из проволочной сетки с шевронным протектором, покрывающим 50 процентов площади контакта поверхности. Каждое колесо приводится в движение собственным отдельным узлом тягового привода, состоящим из редуктора гармонического привода, приводного двигателя и узла блейка. И стекловолоконное крыло было прикреплено к каждому колесу. Часть крыла предоставлена астронавтами на Луне.
Приводной двигатель был постоянным током, щеточным двигателем постоянного тока 36 В постоянного тока, мощностью 1/4 лошадиной силы. Каждый двигатель оснащен приборами для контроля температуры. Термовыключатель на каждом двигателе замыкается при приближении его верхней рабочей температуры. Редуктор гармонического привода снижает скорость двигателя в соотношении 80:1 и обеспечивает непрерывную подачу мощности на колеса на всех скоростях без необходимости переключения передач. Тормоз был механическим и управлялся с ручного контроллера по проводам.
Передние и задние узлы рулевого управления механически независимы друг от друга. Предусмотрено управление любым набором колес (или обоими наборами). В случае неисправности рулевого управления один набор колес может быть отключен механически, и миссия может продолжать использовать активную систему рулевого управления. Максимальный ход рулевого привода приводит к внешнему углу колеса 22 градуса и внутреннему углу колеса 50 градусов.
На переднем шасси установлены две батареи. Каждая батарея рассчитана на емкость 115 ампер-часов и содержит 23 элемента. Каждая батарея весит 59 фунтов. Перезарядка этих батарей невозможна.
DGU: БЛОК ГИРОСКОПА НАПРАВЛЕНИЯ и SPU: БЛОК ОБРАБОТКИ СИГНАЛОВ также были установлены на переднем шасси. DGU использовался для определения направления курса LRV и северного направления Луны. А SPU выполняет функции цифрового и аналогового компьютера. Это оборудование покрыто многослойным алюминизированным майларом и нейлоновой сеткой с изоляционным одеялом с белой бета-тканью. Алюминиевые тепловые ремни, подключенные к SPU и DGU, отводят тепло от электронных компонентов и сохраняют его в батареях и теплоотводах с плавкой массой. В конце лунной вылазки астронавты открывают пылезащитные чехлы из стекловолокна, чтобы обнажить тепловые зеркала из плавленого кварца, установленные поверх батарей. Когда батареи достигают своей нижней предельной рабочей температуры примерно 45 градусов по Фаренгейту.

Как водить
LRV управлялся с помощью Т-образного ручного контроллера на консоли. Вы можете управлять LRV одной рукой и бежать вперед и назад с различной скоростью. Наклон контроллера влево или вправо от нейтрального положения инициирует команды рулевого управления в направлении движения контроллера. Наклон контроллера вперед от нейтрального положения пропорционально увеличивает скорость движения. LRV-panel-noID крупный план панели управления лунохода MSFCРеверсивная мощность применяется, когда контроллер наклоняется назад за пределы нейтрального положения, и водитель нажимает на переключатель запрета реверса на ручном контроллере. Торможение инициируется, когда контроллер тянется назад. Примерно на три дюйма назад подпружиненный фиксатор включит ручку, чтобы зафиксировать ее в положении «парковка». Команда «повернуть налево» отключает стояночный тормоз.

Консоль управления и отображения

Консоль управления и индикации разделена на две основные части. Навигационная часть расположена в верхней части панели, а органы управления переключением и мониторингом электрических нагрузок — в нижней части.
Консоль и вид сзади лунного транспортного средства «Аполлон» (фото масштабной модели)
ИНТЕГРИРОВАННЫЙ ИНДИКАТОР ПОЛОЖЕНИЯ (IPI) / ИНДИКАТОР КУРСА
отображает направление LRV относительно лунного севера.
ИНДИКАТОР ПОДШИПНИКА
показывает направление на ЛМ.
ИНДИКАТОР РАССТОЯНИЯ
сообщает о пройденном LRV расстоянии с шагом 0,1 км. Этот дисплей управляется блоком обработки навигационного сигнала, который, в свою очередь, получает входные данные от третьего по скорости одометра тягового привода для компенсации пробуксовки колес.
ИНДИКАТОР ДИАПАЗОНА
показывает расстояние до ЛМ.
ИНДИКАТОР ОТНОШЕНИЯ
обеспечивает индикацию тангажа и крена LRV. Для считывания углов крена индикатор поворачивается вперед, что открывает шкалу ROLL левому члену экипажа. Эта индикация считывается экипажем и передается в Центр управления полетами.
УСТРОЙСТВО ЗАЩИТЫ ОТ СОЛНЦА
определяет направление LRV относительно солнца. Это направление можно сравнивать с направлением гироскопа через регулярные интервалы для проверки дрейфа гироскопа. При подъеме в положение устройство отбрасывает тень на градуированную шкалу.
ИНДИКАТОР СКОРОСТИ
показывает скорость LRV от 0 до 20 км/ч. Этот дисплей управляется импульсами одометра от правого заднего колеса.
ПЕРЕКЛЮЧАТЕЛЬ МОМЕНТА ГИРОСКОПА
настраивает навигационный гироскоп для коррекции индикации HEADING. Перемещение переключателя ВПРАВО перемещает шкалу курса против часовой стрелки; при перемещении переключателя ВЛЕВО шкала вращается по часовой стрелке.
НАВ-СИЛОВОЙ ВЫКЛЮЧАТЕЛЬ
используется для подачи питания от основных шин к навигационной подсистеме.
ПЕРЕКЛЮЧАТЕЛЬ СБРОСА СИСТЕМЫ
используется для сброса цифровых дисплеев ПЕЛЕНГА/РАССТОЯНИЯ/ДИАПАЗОНА на ноль.
РАЗДЕЛ ПИТАНИЯ
содержит автоматические выключатели, которые соединяют батареи с основными шинами питания, вспомогательный автоматический выключатель выходного сигнала, а также автоматические выключатели и управляющий переключатель для питания +-15 В постоянного тока на широтно-импульсных модуляторах. С четырьмя основными шинами питания любая основная нагрузка, например, приводной двигатель, рулевой двигатель и т. д., может быть подключена к любой батарее.
РУЛЕВАЯ ЧАСТЬ
автоматический выключатель и переключатель для каждого из двух рулевых двигателей.
РАЗДЕЛ ПРИВОДНОЙ СИЛОВОЙ ЧАСТИ
автоматический выключатель и переключатель для каждого из четырех приводных двигателей.
РАЗДЕЛ ВКЛЮЧЕНИЯ ПРИВОДА
содержит переключатель для каждого приводного двигателя, который позволяет водителю выбирать широтно-импульсный модулятор (ШИМ) 1 или 2.
МОНИТОР МОЩНОСТИ/ТЕМПЕРАТУРЫ
обеспечивает состояние электрической системы транспортного средства и температуры аккумуляторов и двигателей. Напряжение аккумулятора и ток отображаются на одном и том же счетчике. Положение переключателя «вольт-ампер» определяет, какой из двух показателей отображается.
СИСТЕМА ПРЕДУПРЕЖДЕНИЯ И ПРЕДУПРЕЖДЕНИЯ
дает астронавтам визуальное предупреждение о том, что одна из батарей или двигателей тягового привода перегревается. Подпружиненная, откидная панель «Alarm», расположенная наверху консоли, удерживается магнитом.
Кому интересно



Оценили 0 человек
0 кармы